
Stepper motors are widely used in industrial automation because they provide accurate positioning, repeatable motion, and straightforward digital control. From CNC machines and medical devices to robotics and semiconductor equipment, these motors are commonly selected when engineers need reliable incremental movement without the complexity of full servo feedback systems.
Understanding how does a stepper motor work is important for machine designers, automation engineers, and OEM manufacturers involved in motion control applications.
Unlike conventional AC or DC motors that rotate continuously after power is applied, a stepper motor rotates in small controlled angular movements called steps. Each pulse sent from the controller produces a predictable amount of shaft rotation.
Complete Technical Resource:
Stepper Motors: Complete Technical Guide for Industrial Applications
What Is a Stepper Motor?
A stepper motor is a brushless synchronous motor designed to divide rotational movement into fixed angular increments.
Instead of spinning continuously, the rotor moves one step at a time according to electrical pulse commands generated by a controller and executed by the stepper driver.
1.8° step angle (200 steps per revolution)
0.9° step angle (400 steps per revolution)
High repeatability for positioning tasks
Pulse-based digital motion control
Because of this operating principle, stepper motors are commonly used in systems that require accurate positioning, low-speed stability, and cost-effective open-loop control.
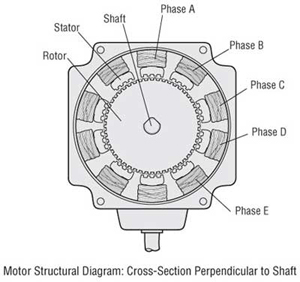
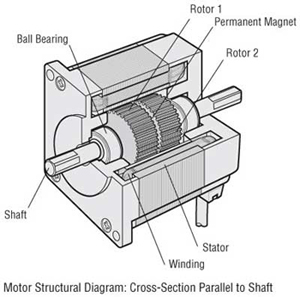
Main Components of a Stepper Motor
Before explaining how a stepper motor works, it is important to understand its basic internal structure.
| Component | Function |
|---|---|
| Stator | Contains electromagnetic coils that generate magnetic fields |
| Rotor | Rotating component aligned by magnetic attraction |
| Driver | Controls current switching and phase excitation |
| Controller | Generates pulse and direction signals |
| Bearings & Shaft | Support mechanical rotation and load transmission |
How Does a Stepper Motor Work?
The working principle of a stepper motor is based on controlled electromagnetic attraction.
When electrical current flows through a stator winding, the winding becomes magnetized and creates a magnetic field. The rotor naturally aligns itself with this energized magnetic pole.
By energizing different stator phases in sequence, the magnetic field rotates around the stator step by step. The rotor follows this rotating magnetic field, producing controlled mechanical motion.
Basic Operating Process
The controller sends a pulse signal
The driver energizes a stator phase
A magnetic field is generated
The rotor aligns with the magnetic pole
The next phase is energized
The rotor advances to the next step position
This sequence continuously converts electrical pulse signals into precise rotational movement.
Electromagnetic Rotation Principle
The key principle behind stepper motor operation is rotating magnetic field generation.
Each energized stator coil produces its own magnetic field. The driver controls the timing and switching sequence of these coils with high precision.
As the excitation sequence changes, the magnetic field effectively rotates around the stator. The rotor follows this moving magnetic field because magnetic systems naturally seek the position of lowest magnetic resistance.
Unlike conventional induction motors that rotate continuously, stepper motors move in discrete angular increments because of their toothed rotor and stator structure.
1.8° step angle = 200 steps per revolution
0.9° step angle = 400 steps per revolution
This predictable movement makes open-loop positioning possible in many automation applications.
Stepper Motor Phase Excitation Sequence
Stepper motor movement depends entirely on phase excitation order.
The following table shows a simplified excitation sequence for a standard two-phase stepper motor.
| Step | Phase A | Phase B | Rotor Position |
|---|---|---|---|
| 1 | Positive | Off | 0° |
| 2 | Off | Positive | 1.8° |
| 3 | Negative | Off | 3.6° |
| 4 | Off | Negative | 5.4° |
The excitation sequence determines rotation direction and positioning accuracy in industrial stepper motor systems.
How Pulse Signals Control Stepper Motor Motion
Stepper motors are controlled entirely by digital pulse signals.
Every input pulse corresponds to one incremental movement of the motor shaft.
| Pulse Parameter | Motor Behavior |
|---|---|
| Pulse Count | Controls position |
| Pulse Frequency | Controls speed |
| Pulse Sequence | Controls direction |
For example, a standard 1.8° stepper motor requires 200 pulses to complete one full revolution.
More pulses = more rotation
Higher pulse frequency = higher speed
Reversing phase order = reversing rotation direction
This simple digital control method is one reason stepper motors integrate easily with PLCs, CNC systems, and industrial automation controllers.
Full-Step, Half-Step, and Microstepping Modes
Modern stepper drivers support several stepping modes depending on required motion performance.
Full-Step Mode
The motor advances one full step for every pulse signal.
High holding torque
Simple control structure
More vibration at low speed
Half-Step Mode
Half-step operation alternates between single-phase and dual-phase excitation.
Higher positioning resolution
Smoother operation
Reduced resonance
Microstepping
Microstepping divides each full step into smaller increments using sinusoidal current control.
| Mode | Resolution | Smoothness | Typical Use |
|---|---|---|---|
| Full-Step | 200 steps/rev | Medium | General automation |
| Half-Step | 400 steps/rev | Good | Packaging machinery |
| Microstepping | 1600+ steps/rev | Excellent | CNC and medical systems |
Microstepping is widely used in precision automation systems because it improves motion smoothness and reduces vibration during operation.
Why Stepper Motors Produce Holding Torque
One of the most useful characteristics of a stepper motor is holding torque.
Even when the motor is not rotating, energized stator coils continue generating magnetic force that locks the rotor in position.
Position holding without mechanical brakes
Stable stopping performance
Good repeatability in positioning systems
Suitable for vertical load applications
Why Stepper Motor Torque Drops at High Speed
Stepper motors typically produce less torque as rotational speed increases.
Several electrical and mechanical factors contribute to this behavior:
Winding inductance limits current rise time
Higher pulse frequency reduces magnetic buildup time
Back EMF increases with speed
Rotor inertia affects dynamic response
As motor speed rises, available torque gradually decreases.
Recommended Reading:
Stepper Motor Selection Guide: Key Parameters Explained
How Stepper Motor Drivers Work
The driver acts as the interface between the motion controller and the motor itself.
Its main functions include:
Current regulation
Phase switching
Microstepping control
Overcurrent protection
Pulse signal interpretation
Modern digital drivers use advanced current control algorithms to reduce resonance and improve motion performance.
Related Article:
Working Principle of a Stepper Motor Driver
Industrial Applications of Stepper Motors
Stepper motors are used in many industries because they combine positioning accuracy, repeatability, and relatively simple control architecture.
| Industry | Typical Applications | Why Stepper Motors Are Used |
|---|---|---|
| CNC Machinery | Axis positioning systems | Reliable positioning accuracy |
| Medical Devices | Pumps and analyzers | Smooth low-speed operation |
| Packaging Equipment | Labeling and indexing systems | Fast incremental positioning |
| Robotics | Linear actuators and joints | Pulse-based motion control |
| 3D Printers | Extruder and axis movement | High precision at low cost |
Common Stepper Motor Problems
Losing Steps
Usually caused by insufficient torque, excessive acceleration settings, or incorrect driver current configuration.
Excessive Vibration
Often related to resonance within certain operating speed ranges.
Overheating
Commonly caused by excessive current settings or poor cooling conditions.
Operating Noise
Noise can usually be reduced through microstepping and optimized acceleration tuning.
Further Reading:
Stepper Motor Driver Communication Error Troubleshooting
Frequently Asked Questions
How does a stepper motor move step by step?
The driver energizes stator phases sequentially, creating rotating magnetic fields that move the rotor in fixed angular increments.
Why are stepper motors accurate?
Stepper motors use fixed step angles and pulse-based control, allowing highly repeatable positioning.
What controls stepper motor speed?
Speed is controlled by pulse frequency generated by the controller.
What is microstepping?
Microstepping divides full motor steps into smaller increments using sinusoidal current control.
Why does stepper motor torque decrease at high speed?
At higher speed, inductance and back EMF reduce effective phase current, which lowers available torque.
Do stepper motors require encoders?
Traditional open-loop stepper systems do not require encoders, although closed-loop systems increasingly use feedback for higher reliability.
Conclusion
Understanding how does a stepper motor work helps engineers design more reliable and efficient motion control systems.
Through controlled electromagnetic field rotation, pulse-driven positioning, and precise phase excitation, stepper motors provide dependable incremental motion for a wide range of industrial applications.
Whether used in CNC equipment, robotics, medical systems, or packaging machinery, stepper motors remain one of the most practical and widely used motion control technologies in industrial automation.
Explore More Technical Resources:
Stepper Motors Complete Technical Guide
Top Features of Hybrid Stepper Motors