
Stepper motors are among the most widely used motion control devices in industrial automation, CNC machinery, robotics, medical equipment, semiconductor systems, and precision positioning applications. Unlike conventional DC motors, stepper motors move in discrete angular increments, allowing precise open-loop position control without requiring feedback systems in many applications.
Understanding the different types of stepper motors is essential for engineers designing motion systems that require accurate positioning, repeatability, low-speed torque, and cost-effective control architectures.
The three primary stepper motor technologies used in industry are:
Permanent Magnet (PM) Stepper Motors
Variable Reluctance (VR) Stepper Motors
Hybrid Stepper Motors
Each technology uses different electromagnetic operating principles and offers unique advantages in torque generation, positioning accuracy, efficiency, speed capability, and cost.
For a foundational understanding of the technology discussed in this article, engineers can review:
What Are the Main Types of Stepper Motors?
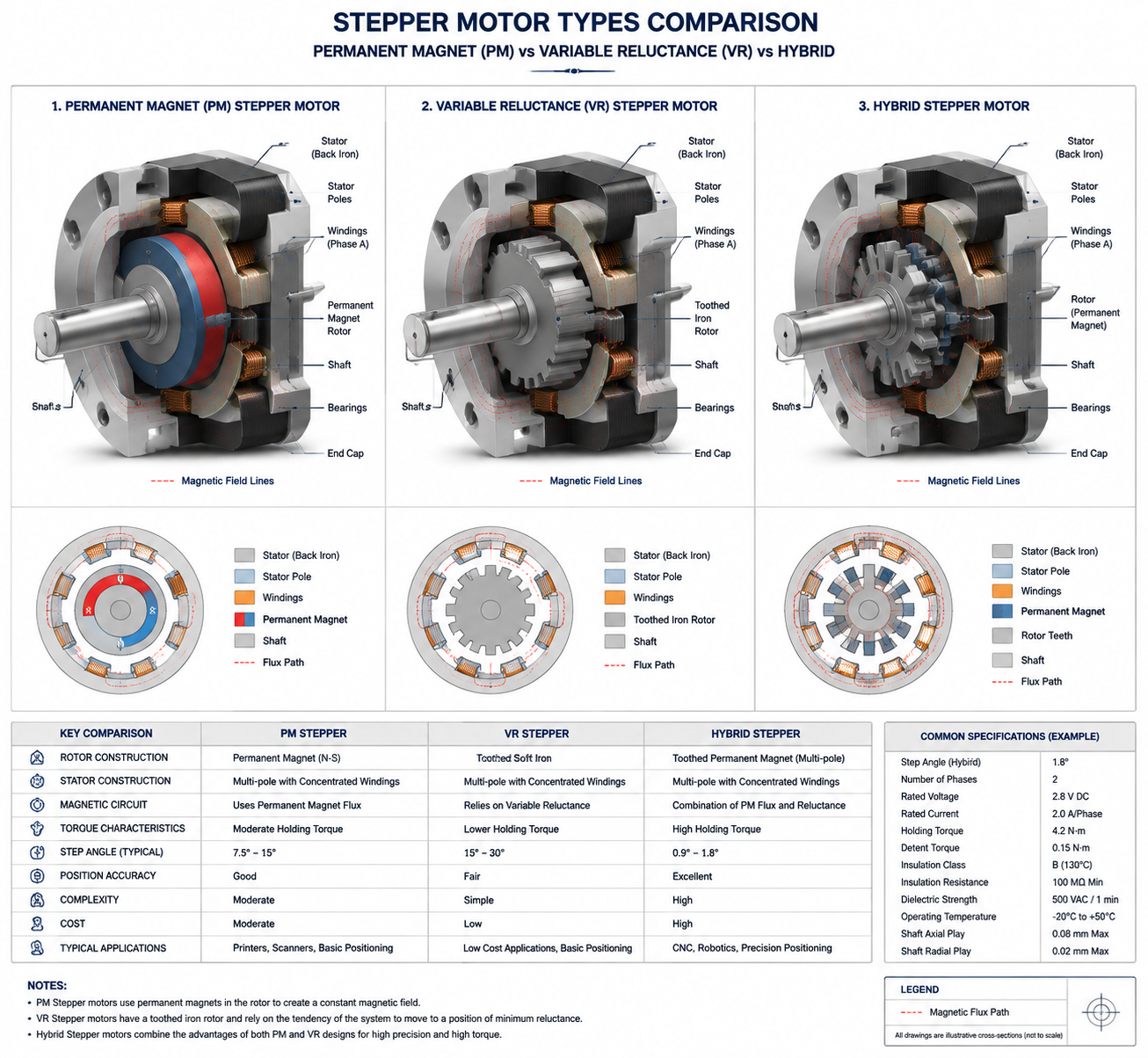
Stepper motors are generally classified according to rotor construction and magnetic operating principle. The three major categories are:
| Stepper Motor Type | Rotor Structure | Positioning Accuracy | Typical Applications |
|---|---|---|---|
| Permanent Magnet (PM) | Permanent magnet rotor | Moderate | Consumer devices, low-cost automation |
| Variable Reluctance (VR) | Soft iron toothed rotor | Moderate to High | High-speed positioning systems |
| Hybrid Stepper Motor | Permanent magnet + toothed rotor | High | CNC, robotics, industrial automation |
Among these technologies, the hybrid stepper motor has become the dominant solution in industrial automation due to its superior torque density, fine step resolution, and excellent positioning repeatability.
Permanent Magnet (PM) Stepper Motors
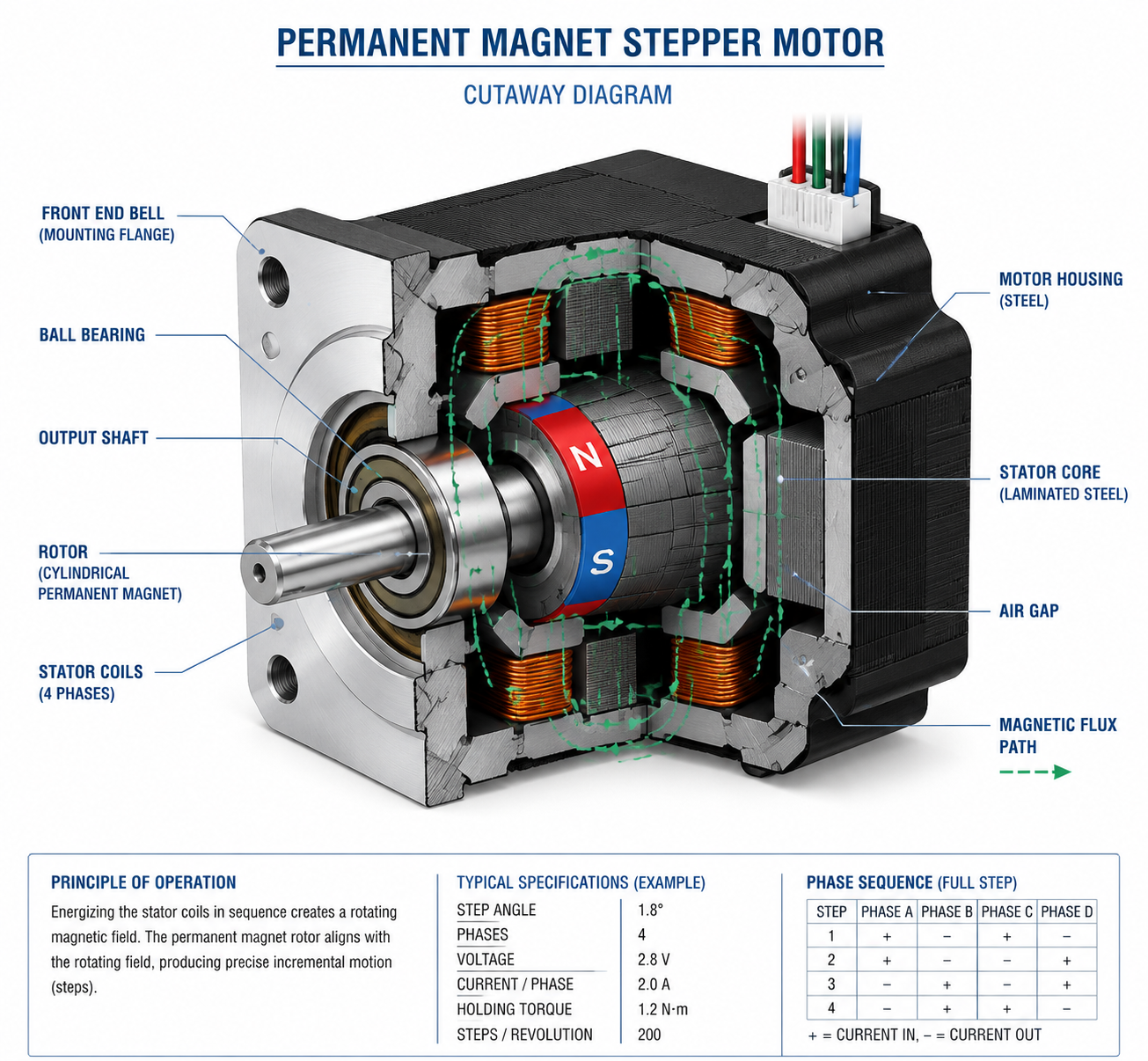
Operating Principle of Permanent Magnet Stepper Motors
A permanent magnet stepper motor uses a rotor made from permanent magnetic material. The stator contains electromagnetic windings that generate magnetic fields when energized sequentially by the motor driver.
As stator phases are energized, the rotor aligns itself with the magnetic field generated by the stator poles. Sequential excitation produces incremental rotational movement.
The step angle and working principle directly determine the positioning resolution and are key differentiators between motor types.
PM stepper motors typically use larger step angles than hybrid designs, commonly:
7.5° per step
15° per step
18° per step
Because of their relatively simple construction, PM stepper motors are economical and easy to manufacture.
Construction Features
| Component | Description |
|---|---|
| Rotor | Cylindrical permanent magnet |
| Stator | Electromagnetic poles with coils |
| Bearings | Standard radial bearings |
| Drive Method | Sequential phase excitation |
Characteristics of PM Stepper Motors
Permanent magnet stepper motors offer several performance advantages:
Good low-speed torque
Simple control architecture
Lower manufacturing cost
Relatively quiet operation
Good holding torque for small systems
However, they also have limitations:
Larger step angles reduce positioning resolution
Lower torque density compared with hybrid motors
Reduced high-speed performance
Lower dynamic response capability
Typical Industrial Applications
Permanent magnet stepper motors are commonly used in:
Printers
Small medical pumps
Consumer electronics
Automotive HVAC actuators
Office automation equipment
Simple valve control systems
PM stepper motors are particularly suitable for low-cost applications where extremely high positioning accuracy is not required.
Variable Reluctance (VR) Stepper Motors
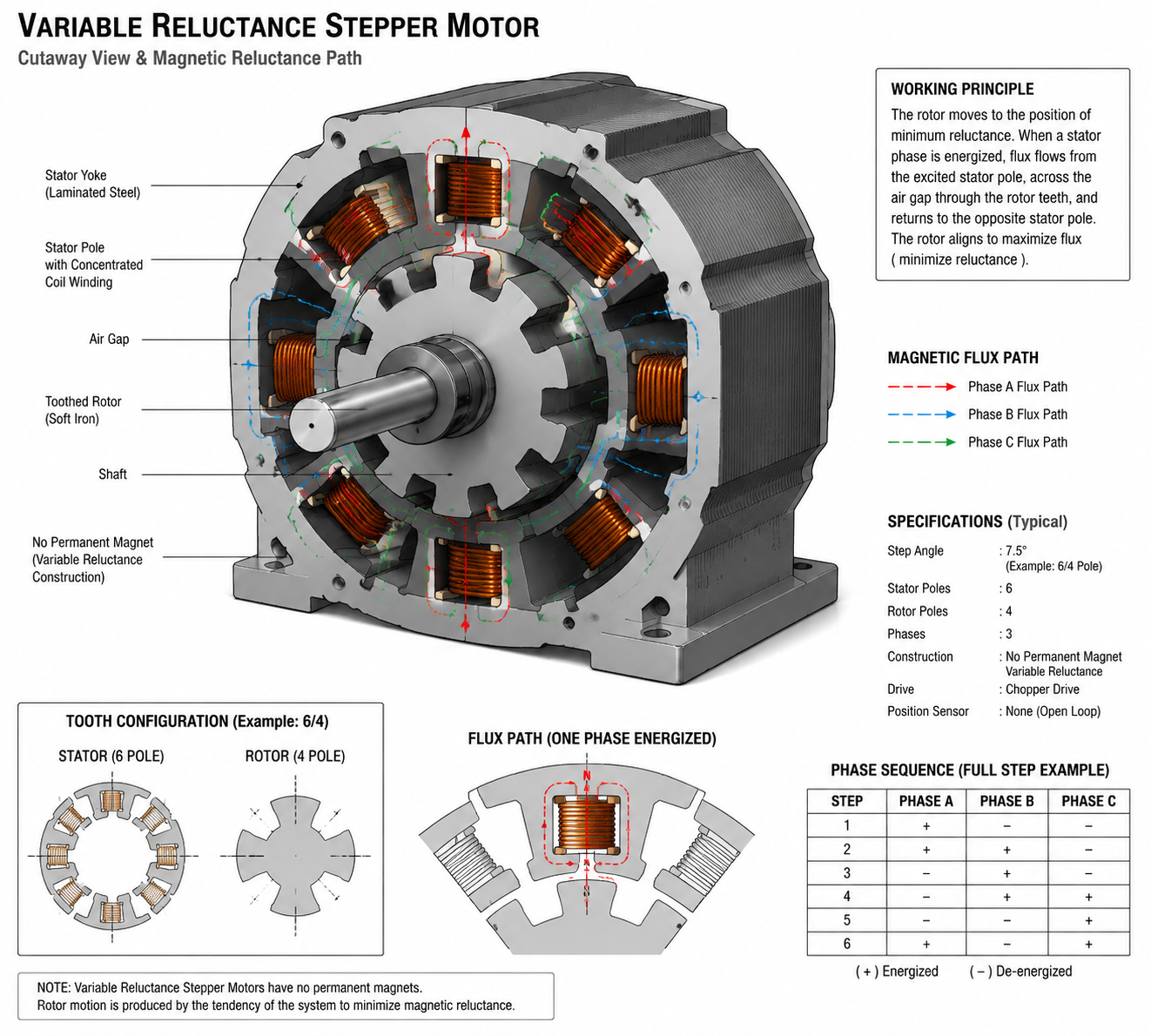
Operating Principle of Variable Reluctance Stepper Motors
A variable reluctance stepper motor operates according to the principle of minimum magnetic reluctance.
Unlike PM motors, VR stepper motors use a soft iron rotor without permanent magnets. The rotor contains multiple teeth, while the stator contains energized electromagnetic poles.
When a stator phase is energized, the rotor automatically aligns itself with the magnetic path having the lowest reluctance. Sequential excitation causes the rotor to rotate in discrete step increments.
Construction Features
| Component | Description |
|---|---|
| Rotor | Soft iron toothed rotor |
| Magnet | No permanent magnet |
| Stator | Multi-pole electromagnetic structure |
| Rotor Inertia | Very low |
Characteristics of VR Stepper Motors
Variable reluctance stepper motors provide several unique operating characteristics:
Very fast acceleration capability
Low rotor inertia
High stepping rates
Excellent dynamic response
Simplified rotor structure
However, VR motors also exhibit disadvantages:
Low holding torque
Lower torque output overall
Higher vibration levels
Reduced torque at low speeds
Complex magnetic design requirements
Step Resolution
VR stepper motors can achieve relatively fine step angles depending on rotor tooth geometry and stator pole configuration. Typical step angles include:
5°
2°
1.8°
Because rotor inertia is extremely low, VR motors can accelerate rapidly in applications requiring high stepping frequencies.
Typical Industrial Applications
Variable reluctance motors are less common in modern industrial automation but remain useful in:
High-speed positioning systems
Light-load indexing mechanisms
Scientific instrumentation
Optical scanning equipment
Specialized laboratory systems
Today, many VR applications have gradually transitioned toward hybrid stepper motor technologies due to improved torque performance and better controllability.
Hybrid Stepper Motors
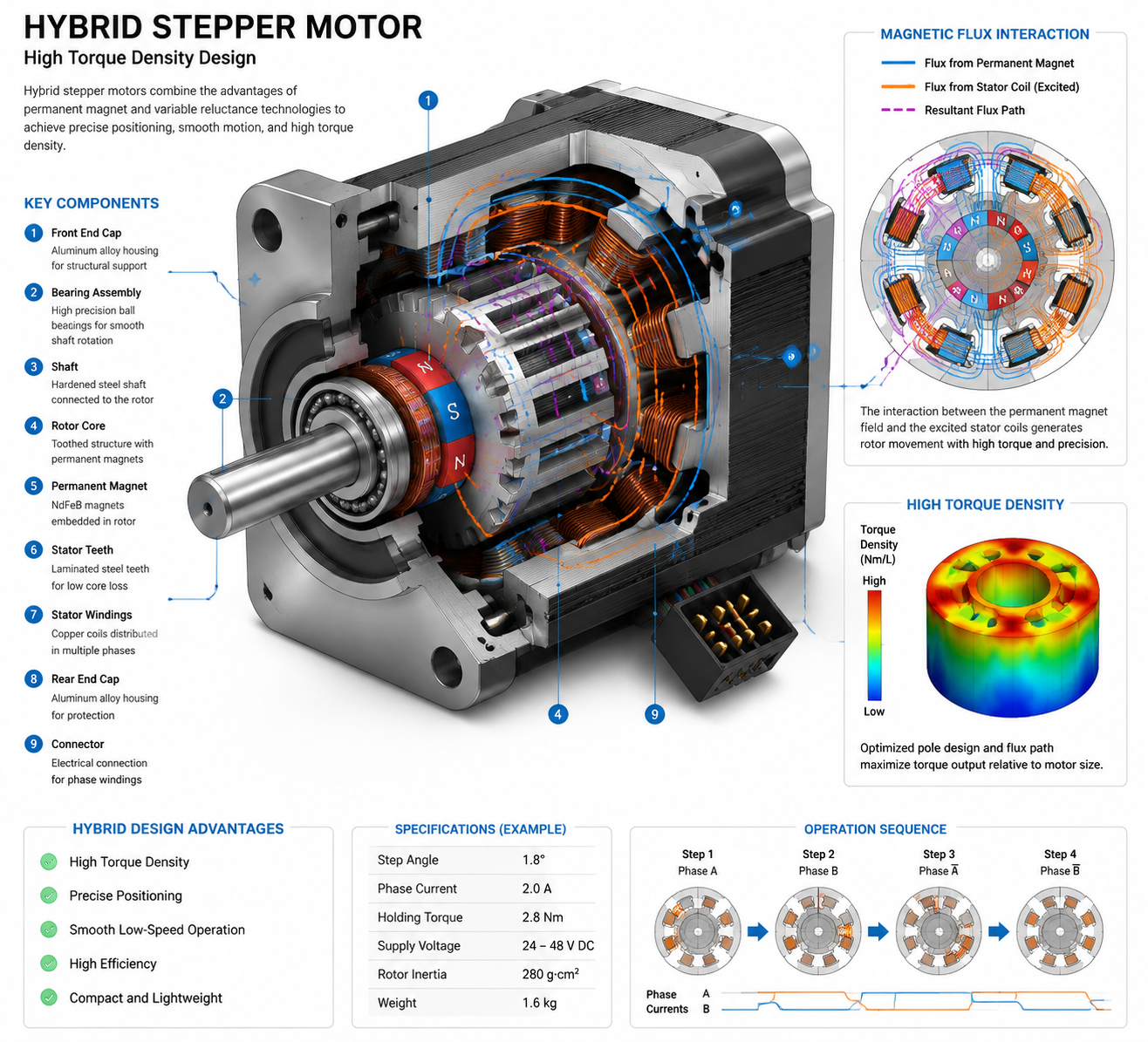
Operating Principle of Hybrid Stepper Motors
The hybrid stepper motor combines the operating principles of both permanent magnet and variable reluctance stepper motors.
It uses:
A permanent magnet rotor core
Precision-machined rotor teeth
Toothed stator poles
This design allows hybrid motors to achieve:
High magnetic flux density
Fine positioning resolution
Excellent holding torque
High torque-to-size ratio
The rotor usually consists of two toothed cups magnetized axially with opposite polarities. The tooth offset between rotor halves creates highly accurate electromagnetic positioning.
Why Hybrid Stepper Motors Are Different
Hybrid motors integrate the advantages of both PM and VR technologies:
| Feature | Source Technology |
|---|---|
| Permanent magnetic flux | PM stepper motor |
| Fine toothed geometry | VR stepper motor |
| High holding torque | PM technology |
| High positioning precision | VR technology |
Step Angle and Resolution
Hybrid stepper motors commonly achieve very fine step angles:
1.8° (200 steps/revolution)
0.9° (400 steps/revolution)
0.72°
0.45°
With microstepping drivers, positioning resolution can be increased dramatically.
For example:
| Microstepping Mode | Effective Resolution |
|---|---|
| 1/2 Step | 400 steps/rev |
| 1/8 Step | 1600 steps/rev |
| 1/16 Step | 3200 steps/rev |
| 1/256 Step | 51200 steps/rev |
Performance Characteristics
Hybrid stepper motors provide:
Excellent low-speed torque
High holding torque
Accurate repeatability
Strong positioning stability
Good compatibility with closed-loop systems
Excellent controllability
These characteristics make hybrid stepper motors ideal for modern industrial automation.
Common NEMA Frame Sizes
| NEMA Size | Typical Applications |
|---|---|
| NEMA 8 | Medical devices, optics |
| NEMA 11 | Compact automation systems |
| NEMA 17 | 3D printers, small CNC systems |
| NEMA 23 | CNC routers, robotics |
| NEMA 34 | Industrial automation machinery |
| NEMA 42 | Heavy-duty motion systems |
Industrial Applications of Hybrid Stepper Motors
Hybrid stepper motors dominate applications requiring precision and reliability:
CNC machines
Laser cutting systems
Industrial robots
Pick-and-place equipment
Semiconductor manufacturing systems
Textile machinery
Packaging automation
Medical imaging systems
Linear motion stages
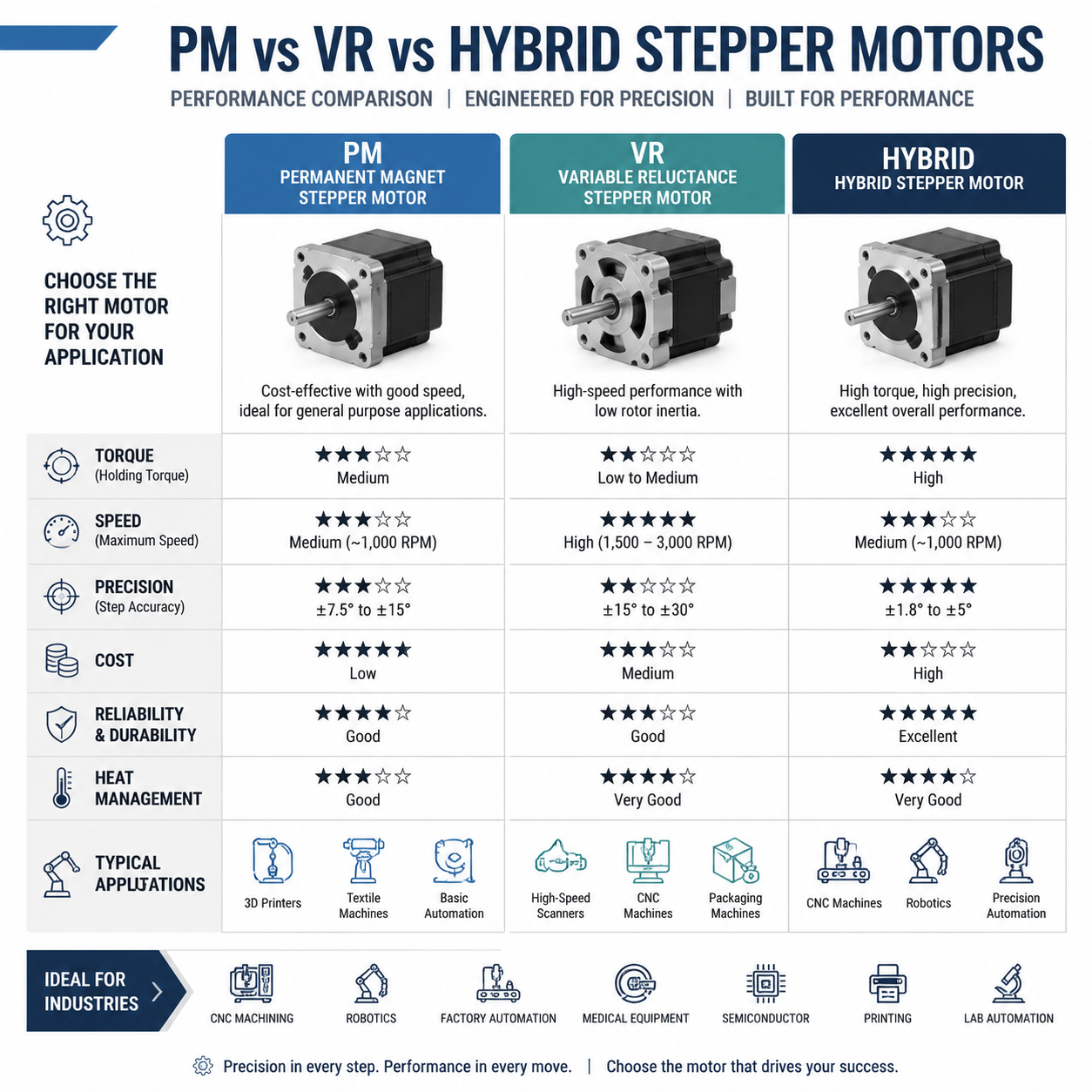
PM vs VR vs Hybrid Stepper Motors Comparison
The following stepper motor types comparison summarizes the key engineering differences among PM, VR, and hybrid technologies.
| Parameter | PM Stepper Motor | VR Stepper Motor | Hybrid Stepper Motor |
|---|---|---|---|
| Rotor Type | Permanent magnet | Soft iron toothed rotor | Magnet + toothed rotor |
| Holding Torque | Moderate | Low | High |
| Position Accuracy | Moderate | Good | Excellent |
| Step Angle | 7.5°–18° | 1.8°–5° | 0.45°–1.8° |
| Rotor Inertia | Moderate | Very low | Moderate |
| Torque Density | Moderate | Low | High |
| High-Speed Capability | Moderate | High | High |
| Cost | Low | Moderate | Higher |
| Typical Use | Consumer products | Specialized positioning | Industrial automation |
Advantages and Disadvantages of Each Type
Permanent Magnet Stepper Motor Advantages
Low manufacturing cost
Simple design
Good low-speed torque
Easy to control
Compact construction
Permanent Magnet Stepper Motor Disadvantages
Lower precision
Larger step angles
Limited high-speed performance
Reduced torque density
Variable Reluctance Stepper Motor Advantages
Low rotor inertia
Fast acceleration
Excellent dynamic response
Simple rotor construction
Variable Reluctance Stepper Motor Disadvantages
Low holding torque
Higher vibration
Lower efficiency
Limited industrial adoption
Hybrid Stepper Motor Advantages
High torque output
Excellent positioning accuracy
Fine step resolution
High repeatability
Strong low-speed performance
Wide industrial compatibility
Excellent microstepping performance
Hybrid Stepper Motor Disadvantages
Higher manufacturing cost
More complex magnetic structure
Requires optimized driver tuning
Industrial Applications of Different Stepper Motors
Consumer Electronics and Office Equipment
Permanent magnet stepper motors remain widely used in:
Printers
Copiers
Camera systems
HVAC actuators
Ticket vending machines
Their low cost and adequate positioning capability make them suitable for medium-precision consumer products.
Scientific and High-Speed Positioning Systems
Variable reluctance motors are occasionally selected for:
Optical scanners
Precision indexing tables
Research instrumentation
High-speed actuator systems
These systems benefit from the low inertia and rapid acceleration capability of VR designs.
Industrial Automation and CNC Machinery
Hybrid stepper motors dominate:
CNC routers
3D printers
Industrial robots
Automated assembly systems
Packaging machinery
Textile equipment
Semiconductor manufacturing systems
Laboratory automation
Modern industrial motion systems require:
High repeatability
Stable torque output
Reliable low-speed operation
Accurate indexing
Strong holding torque
Hybrid stepper motors satisfy these requirements better than PM or VR technologies.

Why Hybrid Stepper Motors Dominate Industrial Automation
In modern automation systems, engineers increasingly prefer hybrid stepper motors because they provide the best balance between:
Torque
Precision
Cost
Reliability
Ease of control
Higher Torque Density
Hybrid motors generate significantly higher torque compared with PM and VR designs of similar size. This allows OEM equipment manufacturers to reduce motor frame size while maintaining performance.
Superior Positioning Accuracy
With standard 1.8° or 0.9° step angles and advanced microstepping drivers, hybrid motors provide precise motion control for high-end automation systems.
Excellent Holding Torque
Industrial systems frequently require motors to hold position under static load conditions. Hybrid motors provide excellent holding torque without requiring closed-loop servo systems in many applications.
Strong Compatibility with Digital Drivers
Modern DSP-based stepper drivers significantly improve:
Motion smoothness
Resonance suppression
Microstepping accuracy
Current control efficiency
Noise reduction
Hybrid motors integrate exceptionally well with these advanced drive technologies.
Broad Industrial Standardization
Hybrid stepper motors are highly standardized across:
NEMA frame sizes
Mounting dimensions
Driver compatibility
Motion controller ecosystems
This simplifies OEM integration and replacement logistics.
How to Choose the Right Stepper Motor Type
Selecting the appropriate stepper motor technology requires evaluating:
Torque requirements
Positioning accuracy
Speed range
Load inertia
Cost targets
Environmental conditions
Duty cycle
Choose PM Stepper Motors When:
Cost is the primary concern
Precision requirements are moderate
Load torque is relatively low
Simple control systems are sufficient
Choose VR Stepper Motors When:
Extremely rapid acceleration is required
Rotor inertia must be minimized
Applications require high stepping frequencies
Holding torque is less important
Choose Hybrid Stepper Motors When:
High precision is required
Industrial reliability is critical
Applications require high holding torque
CNC or robotic systems are involved
Smooth microstepping operation is necessary
Long operational life is essential
Engineering Selection Parameters
| Selection Factor | Recommended Motor Type |
|---|---|
| Lowest cost | PM stepper motor |
| Highest acceleration | VR stepper motor |
| Highest torque density | Hybrid stepper motor |
| Highest precision | Hybrid stepper motor |
| Industrial CNC systems | Hybrid stepper motor |
| Simple consumer products | PM stepper motor |
FAQ
What are the main types of stepper motors?
The three main types of stepper motors are permanent magnet (PM), variable reluctance (VR), and hybrid stepper motors. Each type differs in rotor structure, torque characteristics, positioning accuracy, and industrial application suitability.
What is the difference between hybrid vs PM stepper motor designs?
The primary difference in hybrid vs PM stepper motor design is rotor construction. Hybrid motors combine permanent magnets with toothed rotor geometry, enabling higher torque, finer step resolution, and better positioning accuracy than standard PM motors.
Why are hybrid stepper motors more popular in industrial automation?
Hybrid stepper motors offer superior torque density, accurate positioning, excellent holding torque, and strong compatibility with microstepping drivers, making them ideal for CNC machines, robotics, and precision automation systems.
Are variable reluctance stepper motors still used today?
Yes, but they are less common than hybrid designs. VR motors are still used in specialized applications requiring low inertia and rapid acceleration.
Which stepper motor type provides the highest precision?
Hybrid stepper motors provide the highest positioning precision due to their fine toothed rotor structure and smaller step angles.
Can stepper motors replace servo motors?
In many low-to-medium speed positioning applications, hybrid stepper motors can replace servo motors because they provide accurate open-loop positioning with lower system cost and simplified control architecture.
Conclusion
Understanding the different types of stepper motors is critical for selecting the correct motion control solution in industrial automation systems.
Permanent magnet stepper motors provide economical solutions for low-cost positioning applications. Variable reluctance motors deliver rapid acceleration and low rotor inertia for specialized systems. However, the hybrid stepper motor has become the dominant industrial standard because it combines high torque density, fine positioning resolution, strong holding torque, and excellent controllability.
For OEM machinery manufacturers, robotics designers, and automation engineers, hybrid stepper motors provide the best overall balance of performance, reliability, and cost-effectiveness.
To further explore stepper motor engineering fundamentals and industrial selection strategies, engineers can review our authoritative technical resource: