
In modern industrial automation systems, stepper motors remain one of the most widely used motion control solutions for precise positioning, synchronized indexing, and open-loop speed control. As CNC systems, collaborative robots, semiconductor automation, packaging machinery, and medical devices continue demanding higher positioning precision and better dynamic performance, engineers increasingly compare hybrid stepper motor vs permanent magnet stepper motor technologies during the OEM design phase.
The selection between PM vs hybrid stepper motor architectures directly affects machine accuracy, torque capability, thermal stability, resonance characteristics, driver complexity, and overall system cost. While both technologies operate based on discrete electromagnetic stepping principles, their internal magnetic structures, rotor geometries, and torque-generation mechanisms differ significantly.
Permanent magnet stepper motors are widely used in low-cost positioning applications where moderate torque and simplified control are sufficient. Hybrid stepper motors, by contrast, dominate industrial automation because of their higher torque density, finer step resolution, superior dynamic response, and improved positioning repeatability.
OEM machine manufacturers evaluating motion systems for CNC routers, pick-and-place systems, robotic joints, laboratory analyzers, and automated inspection platforms must understand the engineering tradeoffs between these motor technologies. Factors such as magnetic flux concentration, rotor inertia, thermal dissipation, detent torque, and microstepping performance often determine whether a machine platform achieves stable long-term operation.
This technical guide from HDBMotor provides a detailed engineering-level comparison of hybrid stepper motor vs permanent magnet stepper motor technologies, helping industrial designers select the optimal motion platform for their automation equipment.
For foundational motion control theory, engineers can also review the HDBMotor technical resources:
Stepper Motors Complete Technical Guide
Types of Stepper Motors: PM, VR, and Hybrid
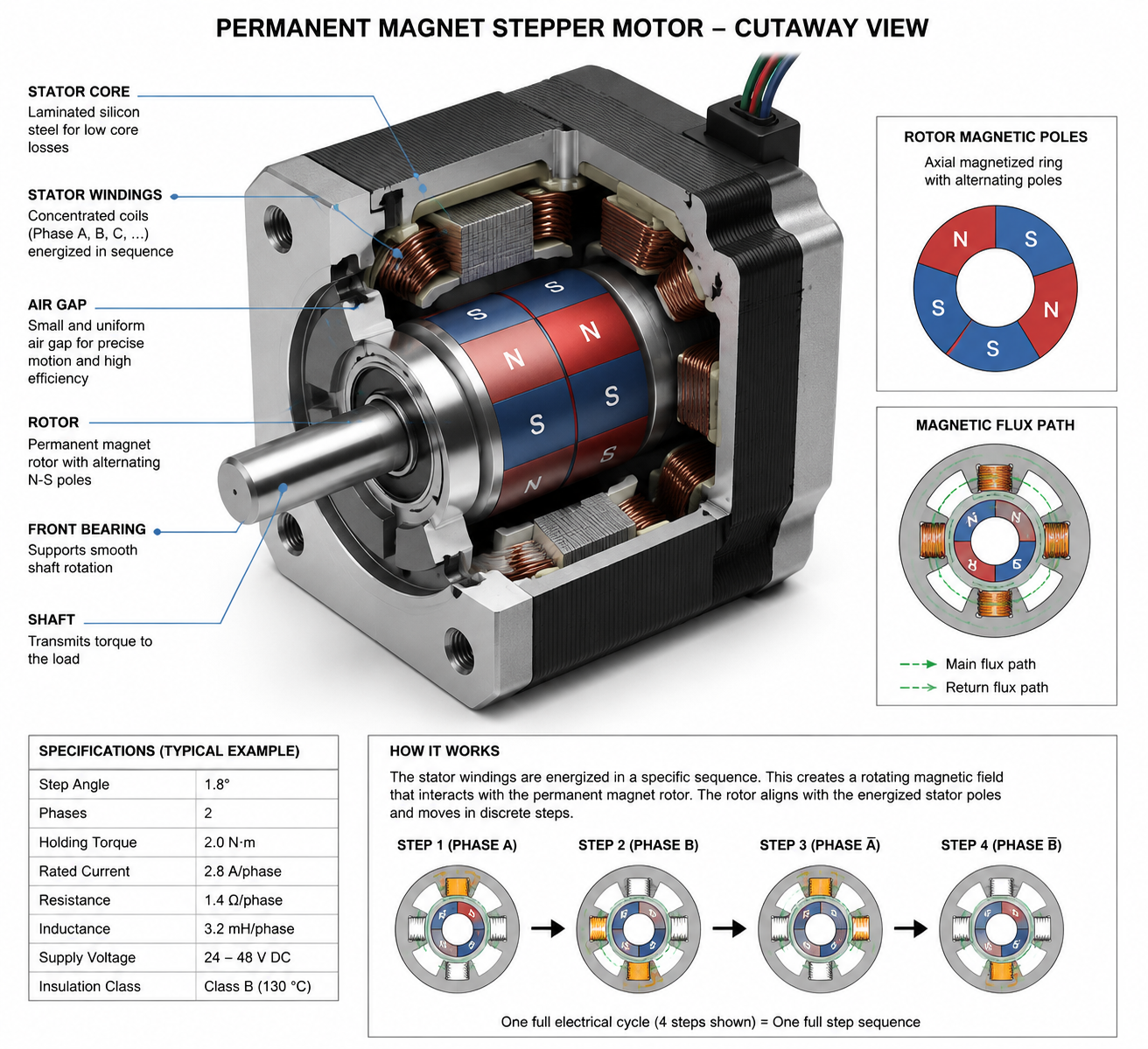
What Is a Permanent Magnet (PM) Stepper Motor?
A permanent magnet stepper motor uses a rotor constructed from permanent magnetic material rather than laminated steel teeth. The rotor typically contains alternating north and south magnetic poles magnetized axially or radially. The stator contains multiple electromagnetic windings arranged in phases that sequentially energize to rotate the magnetic field.
When the stator windings are energized, magnetic attraction and repulsion forces cause the rotor to align with the active magnetic field. Each switching sequence advances the rotor by a fixed angular increment called the step angle.
PM Stepper Motor Structure
The rotor of a PM stepper motor usually consists of cylindrical ferrite or rare-earth magnetic material without fine tooth structures. Because the rotor lacks high tooth-count geometry, the achievable step resolution is lower than that of hybrid stepper motors.
Most permanent magnet stepper motors use:
Simple rotor magnetic pole structures
Lower phase counts
Larger step angles
Lower manufacturing complexity
Reduced magnetic flux concentration
Working Principle of PM Stepper Motors
Torque generation in PM stepper motors primarily results from the interaction between the stator electromagnetic field and the rotor permanent magnetic field. Unlike variable reluctance motors, PM motors maintain detent torque even when unpowered because the rotor magnetic poles interact with the stator teeth.
This inherent holding capability is beneficial for low-cost positioning systems where limited static holding torque is required without continuous current excitation.
Advantages of Permanent Magnet Stepper Motors
Low manufacturing cost
Simple rotor construction
Good low-speed torque
Detent holding torque without power
Compact design for consumer applications
Reduced driver complexity
Limitations of PM Stepper Motors
Larger step angles
Lower positioning accuracy
Limited high-speed performance
Higher torque ripple
Reduced microstepping smoothness
Lower torque density
Typical Permanent Magnet Stepper Motor Applications
Permanent magnet stepper motor applications are common in cost-sensitive systems where moderate precision is acceptable.
Office automation equipment
Consumer electronics
Automotive HVAC actuators
Small pumps and valves
Basic medical dispensers
Low-cost positioning systems
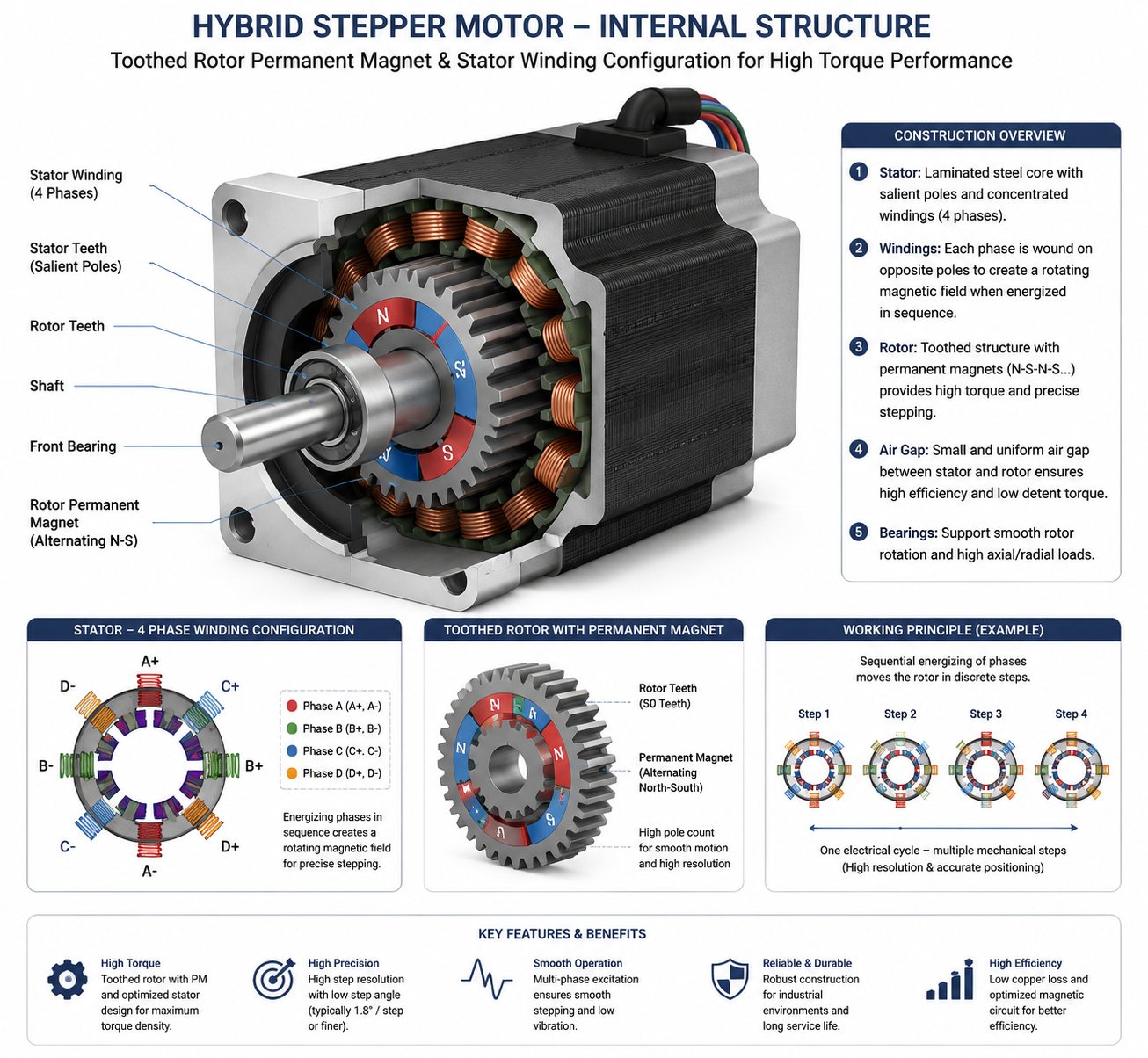
What Is a Hybrid Stepper Motor?
A hybrid stepper motor combines the operating principles of permanent magnet and variable reluctance technologies. This hybrid architecture integrates a permanent magnet rotor core with precision-machined toothed rotor laminations to achieve significantly higher torque density and finer positioning resolution.
Hybrid stepper motors are the dominant solution in industrial motion control because they provide high precision, excellent holding torque, stable microstepping performance, and superior dynamic response.
Hybrid Stepper Motor Structure
The rotor of a hybrid stepper motor consists of:
Axially magnetized permanent magnet core
Two toothed rotor cups
Offset rotor tooth geometry
Precision laminated magnetic steel
The rotor teeth are mechanically offset by half a tooth pitch, enabling very fine step increments when interacting with the stator magnetic field.
Typical hybrid stepper motors achieve:
1.8° step angles
0.9° high-resolution variants
High microstepping linearity
High torque-to-volume ratio
Combination of PM and Variable Reluctance Principles
In hybrid stepper motors, torque is generated through both permanent magnetic attraction and reluctance alignment forces. The magnetic circuit concentrates flux through the fine rotor teeth, dramatically increasing torque density and positioning precision compared with PM stepper motors.
The toothed rotor structure also improves magnetic coupling efficiency, enabling better acceleration capability and higher pull-out torque.
Hybrid Stepper Motor Advantages
High torque stepper motor capability
Excellent positioning repeatability
Fine step resolution
Strong low-speed holding torque
Improved microstepping smoothness
Better CNC motion performance
Superior dynamic response
Industrial-grade reliability
Industrial Applications of Hybrid Stepper Motors
Stepper motor for CNC machines
Semiconductor automation
Industrial robotics
Packaging machinery
Medical imaging systems
Precision inspection platforms
Linear actuator systems
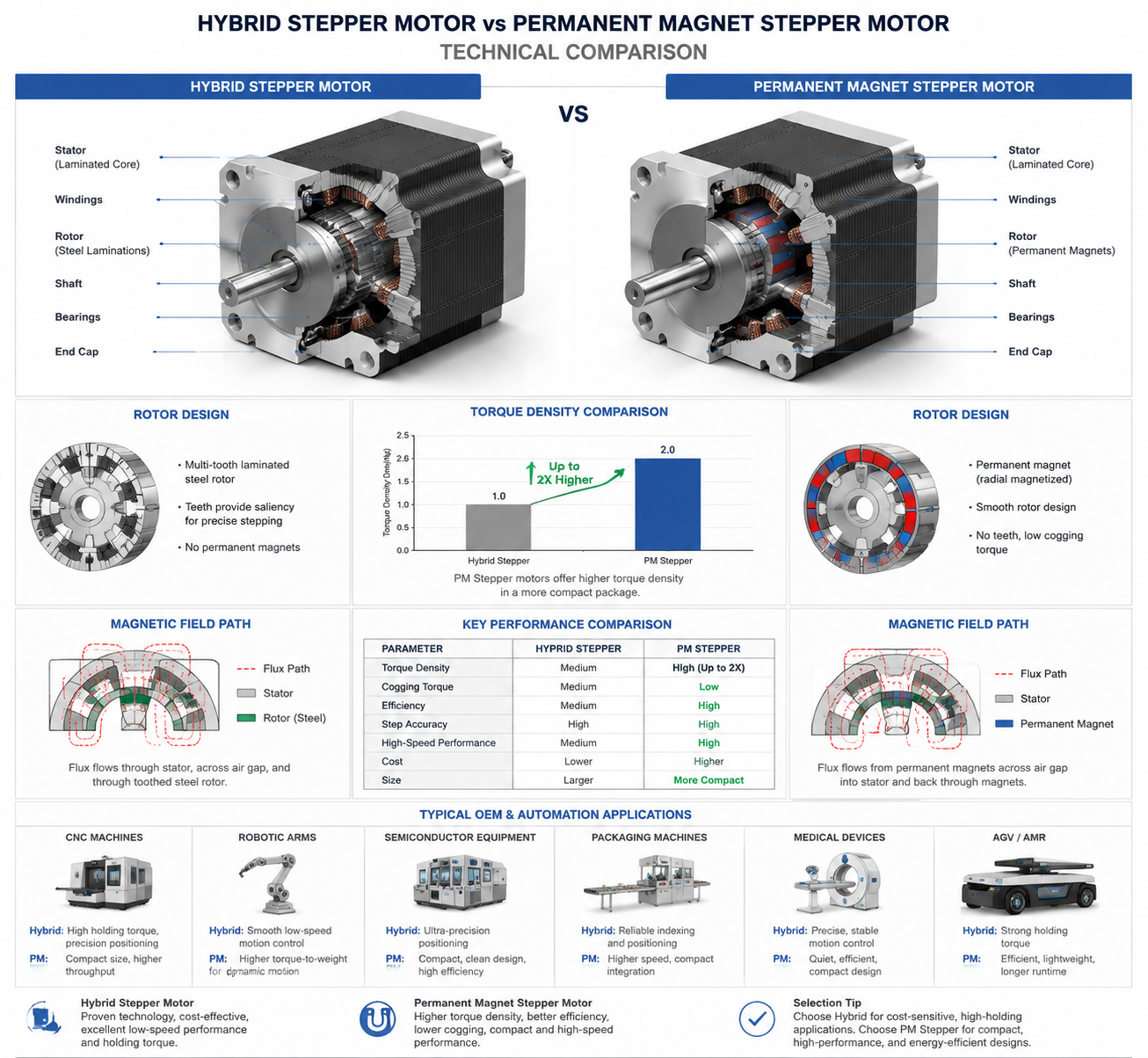
Structural Differences Between PM and Hybrid Stepper Motors
The primary engineering difference in hybrid stepper motor vs permanent magnet stepper motor systems lies in rotor geometry and magnetic flux control. PM motors rely mainly on direct magnetic pole interaction, while hybrid motors use precision tooth structures to modulate magnetic reluctance and increase torque production efficiency.
| Structural Parameter | PM Stepper Motor | Hybrid Stepper Motor |
|---|---|---|
| Rotor Type | Permanent magnet cylinder | Toothed magnetic rotor |
| Rotor Teeth | Usually absent | Fine precision teeth |
| Magnetic Flux Path | Simplified | Concentrated magnetic circuit |
| Step Resolution | Lower | High precision |
| Rotor Manufacturing | Simple | Complex precision machining |
Hybrid stepper motors require tighter tolerances in rotor tooth alignment and air-gap control. The small air gap improves magnetic flux density but increases manufacturing complexity and assembly precision requirements.
Magnetic Circuit and Torque Generation Comparison
Torque generation mechanisms differ substantially between PM and hybrid stepper motor designs.
In PM stepper motors, electromagnetic torque is primarily generated through direct attraction between the stator magnetic field and permanent magnet rotor poles. The torque curve tends to be less linear, with larger torque ripple and weaker magnetic flux concentration.
In hybrid stepper motors, the magnetic circuit becomes significantly more efficient due to toothed rotor alignment. The rotor teeth channel magnetic flux through localized low-reluctance paths, increasing magnetic field intensity and improving torque density.
This concentrated flux path explains why hybrid motors dominate industrial automation systems requiring high holding torque and precise incremental movement.
| Torque Characteristic | PM Stepper Motor | Hybrid Stepper Motor |
|---|---|---|
| Torque Density | Moderate | High |
| Holding Torque | Lower | Significantly higher |
| Torque Ripple | Higher | Reduced with microstepping |
| Magnetic Flux Efficiency | Moderate | High |
| Dynamic Torque Stability | Limited | Excellent |
Step Angle and Positioning Accuracy Comparison
Positioning accuracy is one of the most critical considerations in industrial stepper motor comparison studies.
PM stepper motors commonly use larger step angles such as 7.5°, 15°, or even 18°. These larger increments reduce positioning precision and limit interpolation smoothness during low-speed motion.
Hybrid stepper motors typically operate at:
1.8° per step
0.9° per step
Microstepping subdivisions up to 256 microsteps
The fine tooth rotor geometry enables significantly higher angular resolution and repeatability.
CNC interpolation systems and semiconductor positioning stages often require extremely fine incremental movement. Hybrid motors therefore provide superior contouring accuracy and smoother motion trajectories.
| Precision Parameter | PM Stepper Motor | Hybrid Stepper Motor |
|---|---|---|
| Typical Step Angle | 7.5° to 18° | 1.8° or 0.9° |
| Positioning Accuracy | Moderate | High precision |
| Microstepping Capability | Limited | Excellent |
| Motion Smoothness | Moderate | Very smooth |
Torque Density and Speed Performance
Hybrid stepper motor advantages become especially visible when evaluating high torque output under dynamic operating conditions.
Because hybrid motors use optimized magnetic flux paths and fine rotor teeth, they achieve higher torque production within the same frame size compared with PM motors.
This higher torque density allows:
Higher acceleration rates
Improved load capacity
Better low-speed stiffness
Reduced missed-step risk
In industrial CNC systems, maintaining stable torque across varying speeds is essential. PM stepper motors often experience rapid torque degradation at increasing RPM because of weaker magnetic coupling and higher inductive limitations.
Hybrid stepper motors maintain usable torque across broader speed ranges, especially when paired with modern DSP-based microstepping drivers.
Resonance suppression is another major advantage. The higher rotor tooth count and better microstepping linearity reduce mechanical oscillation and improve low-speed stability.
| Performance Parameter | PM Stepper Motor | Hybrid Stepper Motor |
|---|---|---|
| Torque Density | Moderate | High |
| High-Speed Capability | Limited | Better dynamic response |
| Resonance Behavior | More pronounced | Easier to control |
| Acceleration Performance | Moderate | Excellent |
Thermal Performance and Efficiency
Thermal management directly affects long-term motor reliability, winding insulation life, and positioning consistency.
PM stepper motors generally operate with lower current densities and lower holding torque, resulting in reduced thermal load under light-duty conditions. However, their lower efficiency means more input energy is lost relative to usable torque output.
Hybrid stepper motors can generate higher thermal energy because of increased current requirements and higher magnetic flux density. Nevertheless, their superior torque efficiency means more mechanical work is achieved per unit volume.
Industrial hybrid stepper motors from HDBMotor often incorporate:
Optimized stator laminations
High-temperature insulation systems
Low-loss magnetic steel
Improved thermal conduction paths
Precision winding techniques
These design improvements reduce thermal hotspots and improve continuous-duty stability.
Cost and Manufacturing Complexity
Manufacturing complexity is one of the main differences between PM vs hybrid stepper motor technologies.
PM stepper motors use simpler rotor construction with lower machining requirements. Their assembly process is faster and less dependent on micron-level alignment tolerances.
Hybrid stepper motors require:
Precision rotor tooth machining
Tight air-gap control
Complex magnetic alignment
High-quality laminations
Advanced winding consistency
As a result, hybrid motors carry higher manufacturing costs but provide substantially improved industrial performance.
| Manufacturing Factor | PM Stepper Motor | Hybrid Stepper Motor |
|---|---|---|
| Production Complexity | Low | High |
| Rotor Machining Precision | Basic | Precision engineered |
| Material Cost | Lower | Higher |
| Industrial Suitability | Entry-level systems | Industrial automation |
Industrial Application Comparison
The choice between hybrid stepper motor vs permanent magnet stepper motor technologies depends heavily on application requirements.
PM motors are suitable for cost-sensitive, moderate-precision applications, while hybrid motors dominate high-performance industrial motion systems.
| Industrial Application | Preferred Motor Type | Engineering Reason |
|---|---|---|
| CNC Machines | Hybrid Stepper | High precision and torque stability |
| Industrial Robotics | Hybrid Stepper | Dynamic response and microstepping |
| Packaging Machinery | Hybrid Stepper | Repeatability and synchronized motion |
| Medical Devices | Hybrid Stepper | Precision dosing and positioning |
| Consumer Electronics | PM Stepper | Lower cost and compact structure |
| Semiconductor Automation | Hybrid Stepper | Ultra-precise positioning control |
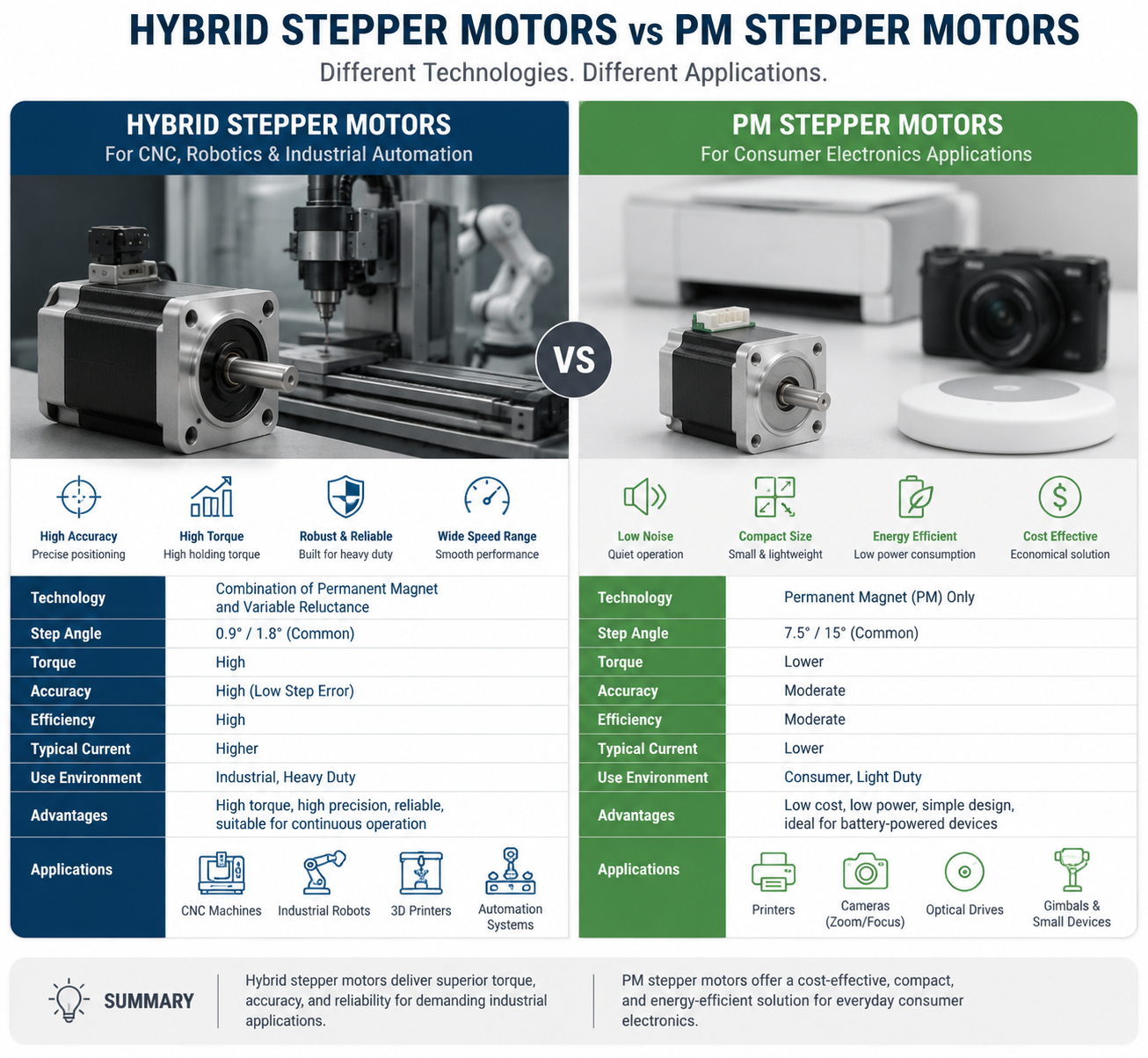
Which Motor Should OEM Designers Choose?
OEM stepper motor selection should never rely solely on initial motor price. Engineers must evaluate the entire motion system, including mechanical transmission, load inertia, acceleration profile, duty cycle, resonance region, thermal limitations, and driver architecture.
PM stepper motors are appropriate when:
Cost sensitivity is critical
Precision requirements are moderate
Motion speed is relatively low
Compact consumer products are targeted
Load inertia is limited
Hybrid stepper motors are preferred when:
High positioning accuracy is required
Industrial reliability is essential
High torque density is necessary
CNC interpolation is involved
Dynamic acceleration is critical
Microstepping smoothness matters
In most industrial automation systems, hybrid stepper motors provide superior long-term value despite higher upfront cost because they reduce positioning error, missed-step risk, and mechanical vibration.
HDBMotor supplies OEM hybrid stepper motor solutions for CNC machinery, robotics, semiconductor automation, and industrial positioning systems requiring stable high-performance motion control.
| OEM Requirement | Recommended Motor | Selection Logic |
|---|---|---|
| Low-Cost Automation | PM Stepper | Lower production cost |
| CNC Motion Platform | Hybrid Stepper | Better precision and torque |
| Medical Precision Equipment | Hybrid Stepper | Stable micro-positioning |
| Consumer Product Motion | PM Stepper | Compact and economical |
Future Trends in Stepper Motor Technology
As industrial automation evolves toward higher speed, higher precision, and greater energy efficiency, stepper motor technology continues advancing in several important directions.
Closed-Loop Hybrid Stepper Systems
Closed-loop stepper systems integrate encoders with DSP-based servo control algorithms, combining the cost advantages of steppers with servo-like positioning verification.
These systems improve:
Anti-resonance control
Torque utilization
Thermal efficiency
High-speed stability
Advanced Magnetic Materials
New rare-earth magnetic materials and low-loss stator laminations improve magnetic flux density while reducing core losses and thermal buildup.
Integrated Motion Platforms
Modern automation systems increasingly integrate:
Motor
Driver
Encoder
Communication bus
Intelligent diagnostics
into compact integrated motion modules.
Higher Precision Manufacturing
Improved rotor machining and tighter air-gap tolerances continue enhancing microstepping linearity and reducing vibration in industrial hybrid stepper motors.
Conclusion
The engineering comparison of hybrid stepper motor vs permanent magnet stepper motor technologies demonstrates that each motor architecture serves different industrial requirements.
Permanent magnet stepper motors provide a practical low-cost solution for moderate-precision positioning applications where simplicity and affordability are prioritized.
Hybrid stepper motors, however, dominate industrial automation because of their superior torque density, fine positioning capability, smoother microstepping behavior, and better dynamic response.
For CNC systems, robotics, semiconductor automation, packaging machinery, and precision medical equipment, hybrid stepper motors remain the preferred OEM motion platform.
Understanding the electromagnetic structure, rotor geometry, thermal characteristics, resonance behavior, and torque-generation principles behind these motor technologies enables engineers to optimize machine performance and long-term reliability.
HDBMotor continues supporting global OEM manufacturers with industrial-grade hybrid and PM stepper motor solutions engineered for demanding automation applications.
FAQ
What is the main difference between a hybrid and PM stepper motor?
The primary difference is rotor structure. PM stepper motors use permanent magnetic poles without fine teeth, while hybrid stepper motors combine permanent magnets with precision toothed rotor laminations for higher torque density and finer positioning accuracy.
Why are hybrid stepper motors used in CNC machines?
Hybrid stepper motors provide better torque stability, finer step resolution, improved microstepping smoothness, and higher positioning accuracy, making them ideal for CNC interpolation and precision machining systems.
Are PM stepper motors cheaper than hybrid stepper motors?
Yes. PM stepper motors use simpler rotor structures and lower manufacturing complexity, resulting in lower production costs.
Which motor offers better positioning accuracy?
Hybrid stepper motors offer significantly higher positioning accuracy because of their fine rotor tooth geometry and smaller step angles.
Do hybrid stepper motors generate more heat?
Hybrid stepper motors may generate higher thermal loads because of increased torque capability and current density, but their torque efficiency is substantially better in industrial applications.
What industries commonly use hybrid stepper motors?
Hybrid stepper motors are widely used in CNC systems, semiconductor equipment, robotics, packaging machinery, medical automation, and precision inspection systems.
Can PM stepper motors use microstepping drivers?
Yes, but their larger step angles and lower magnetic linearity limit microstepping smoothness compared with hybrid stepper motors.
Which stepper motor is better for OEM automation equipment?
Most industrial OEM automation systems benefit from hybrid stepper motors because they provide better precision, torque density, dynamic response, and long-term operational stability.