
Phase count is one of those motor parameters that gets glossed over in datasheets but ends up driving real design decisions once you're deep into an OEM machine build. If you've ever had a 2-phase motor vibrate a conveyor frame apart at 8 Hz, or watched a 5-phase system hold sub-micron positioning in a wafer handler, you understand why this matters.
This article breaks down the electromagnetic and mechanical differences between 2-phase, 3-phase, and 5-phase stepper motors — not as a product comparison, but as an engineering analysis of when each configuration makes sense and why.
What Does "Phase" Mean in a Stepper Motor?
A phase in a stepper motor is an independently energized winding group. When current flows through a phase, it creates a magnetic flux vector that attracts the rotor's teeth toward alignment. Sequencing through multiple phases rotates that flux vector around the stator, pulling the rotor along in discrete angular steps.
The number of phases determines how many distinct flux positions exist per electrical cycle. More phases means more intermediate flux positions, which translates directly into finer torque transitions and smoother rotor motion. It also affects how abruptly the magnetic field shifts during commutation — a key factor in vibration and resonance behavior.
For a deeper look at the underlying electromagnetic principles, the how stepper motors work guide covers rotor-stator interaction in detail.
2-Phase Stepper Motors
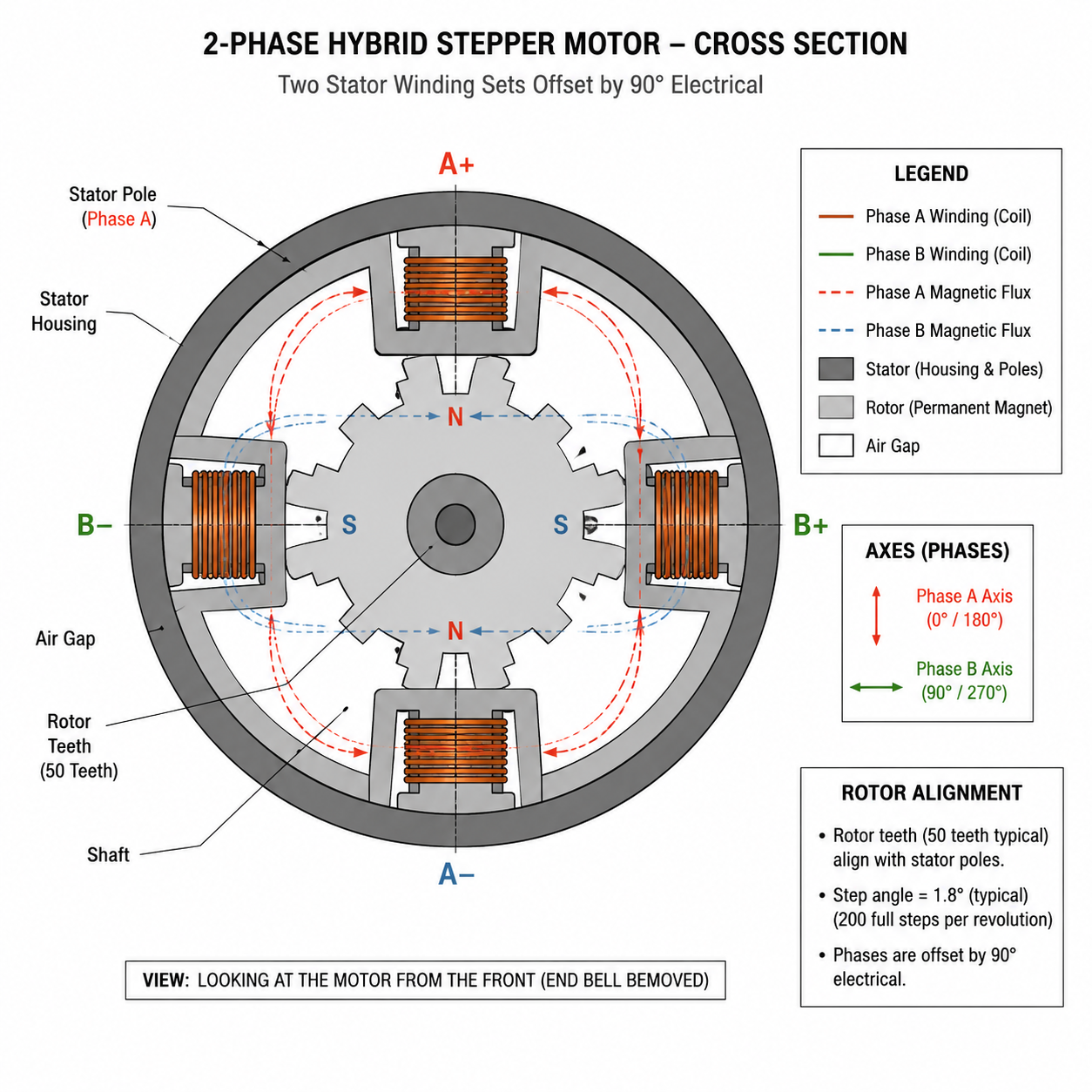
The 2-phase hybrid stepper is the workhorse of industrial automation. Two winding sets, offset 90 electrical degrees, driven in a four-step full-step sequence or eight-step half-step sequence. Simple, cheap, and well-understood.
The standard 1.8° step angle (200 steps/rev) comes from a 50-tooth rotor combined with the 4-pole 2-phase stator geometry. Drivers are everywhere — from basic L298 H-bridge chips to sophisticated DSP-based microstepping drives with current loop bandwidths above 10 kHz.
Where 2-phase motors struggle is torque ripple. In full-step mode, torque ripple can exceed 30% of peak torque. Even with sinusoidal microstepping, the two-phase current waveform produces a torque output that varies as the square root of the sum of squares of two sinusoids — which is theoretically constant, but real winding inductance and back-EMF distortion break that ideal. In practice, you see 5–15% torque ripple even with good microstepping drives.
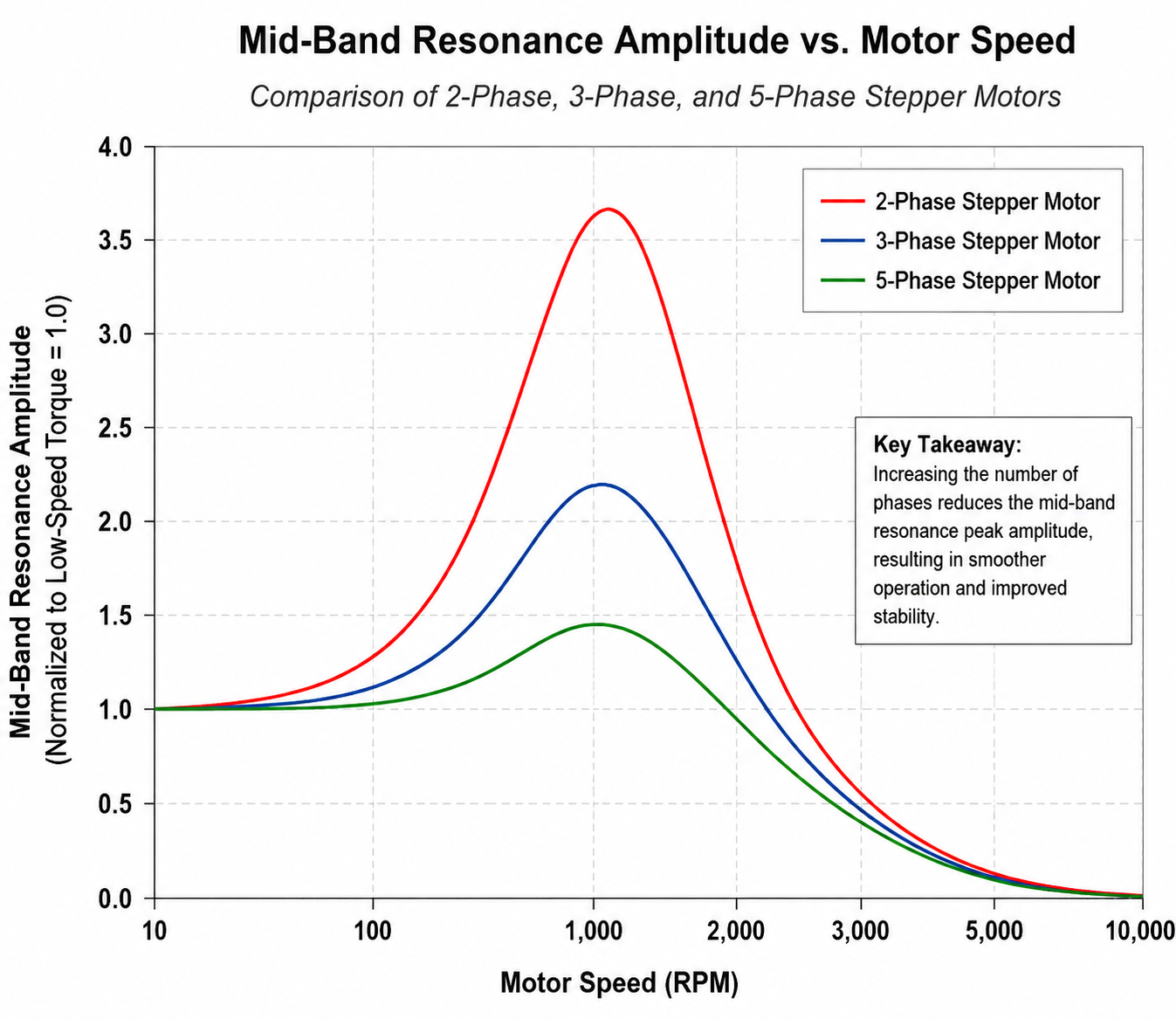
The other issue is mid-band resonance. At certain speeds — typically 100–300 RPM depending on rotor inertia and load — the rotor's natural oscillation frequency aligns with the step excitation frequency. The result is violent vibration, sometimes enough to stall the motor entirely. This is a structural property of the 2-phase excitation pattern, not a driver deficiency. Anti-resonance algorithms in modern drives help, but they don't eliminate the underlying physics.
That said, for the majority of industrial applications — general-purpose CNC axes, packaging indexers, label applicators, simple pick-and-place — 2-phase motors are entirely appropriate. The ecosystem is mature, replacement parts are available globally, and the cost per Newton-meter is hard to beat.
3-Phase Stepper Motors
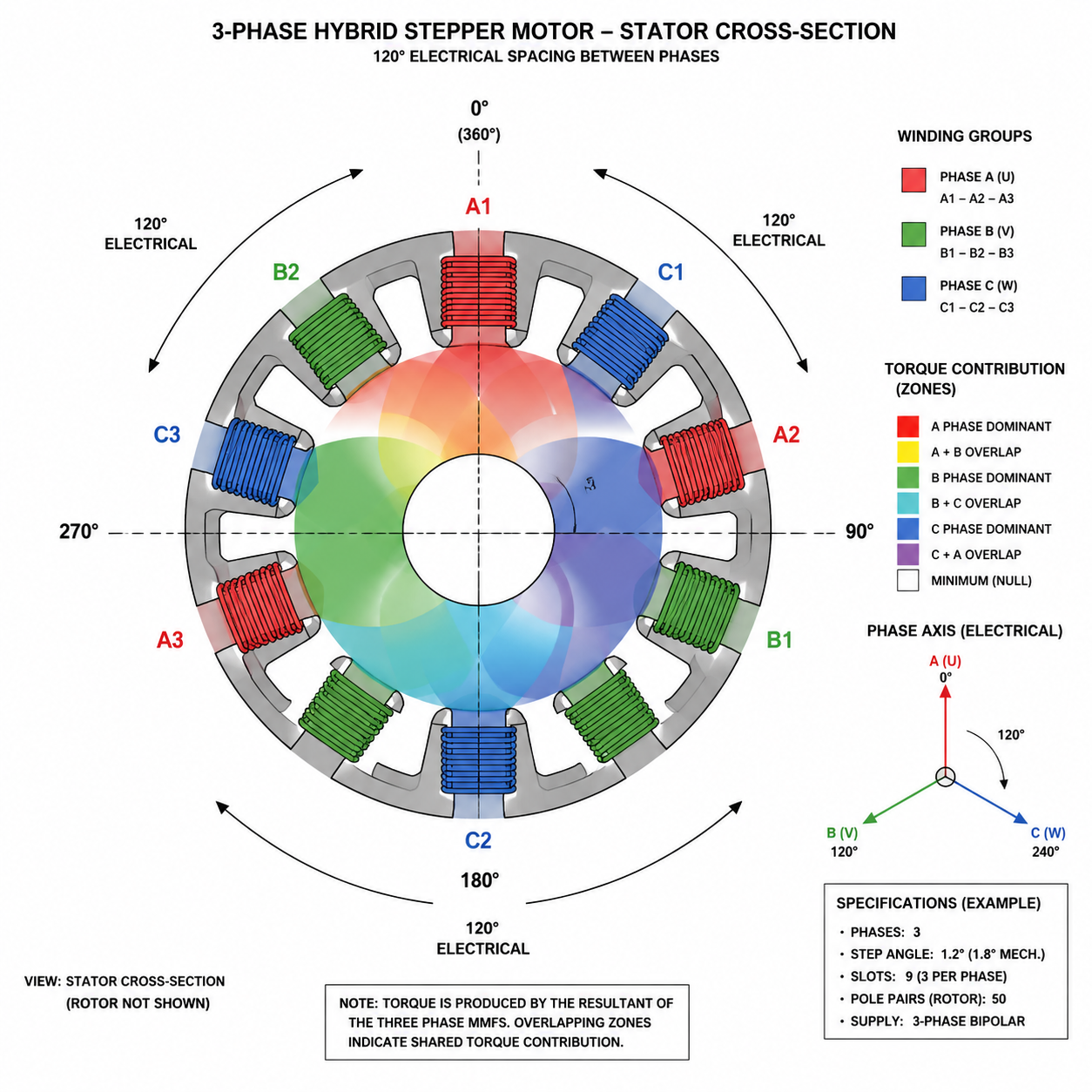
Three-phase stepper motors apply the same electromagnetic logic as three-phase AC induction motors: three windings spaced 120 electrical degrees apart, driven in a six-step sequence. The flux vector rotates more continuously than in a 2-phase system, which has measurable effects on torque quality and vibration.
The torque ripple reduction is real. With three phases, the torque contributions from each winding overlap more smoothly. Theoretical torque ripple in sinusoidal 3-phase excitation drops to roughly 13% of the 2-phase value under ideal conditions. In practice, you're looking at 3–8% ripple with a decent drive — noticeably smoother than a comparable 2-phase system.
Speed stability improves as well. The more continuous flux rotation reduces the abrupt magnetic transitions that excite rotor oscillation. Mid-band resonance doesn't disappear, but the resonance peak is lower in amplitude and easier to suppress with closed-loop or anti-resonance compensation.
Thermally, 3-phase motors distribute heat more evenly across three windings rather than two. At high duty cycles this matters — you can push a 3-phase motor harder before hitting thermal limits, which is relevant in continuous-duty applications like conveyor drives or rotary indexing tables.
The tradeoff is driver complexity. Three-phase stepper drives require a 3-phase H-bridge topology (six switches versus four for 2-phase), and the commutation logic is more involved. The driver cost premium over 2-phase is real, though it's narrowed considerably as 3-phase motor/drive packages have become more common in the European and Asian OEM markets.
5-Phase Stepper Motors
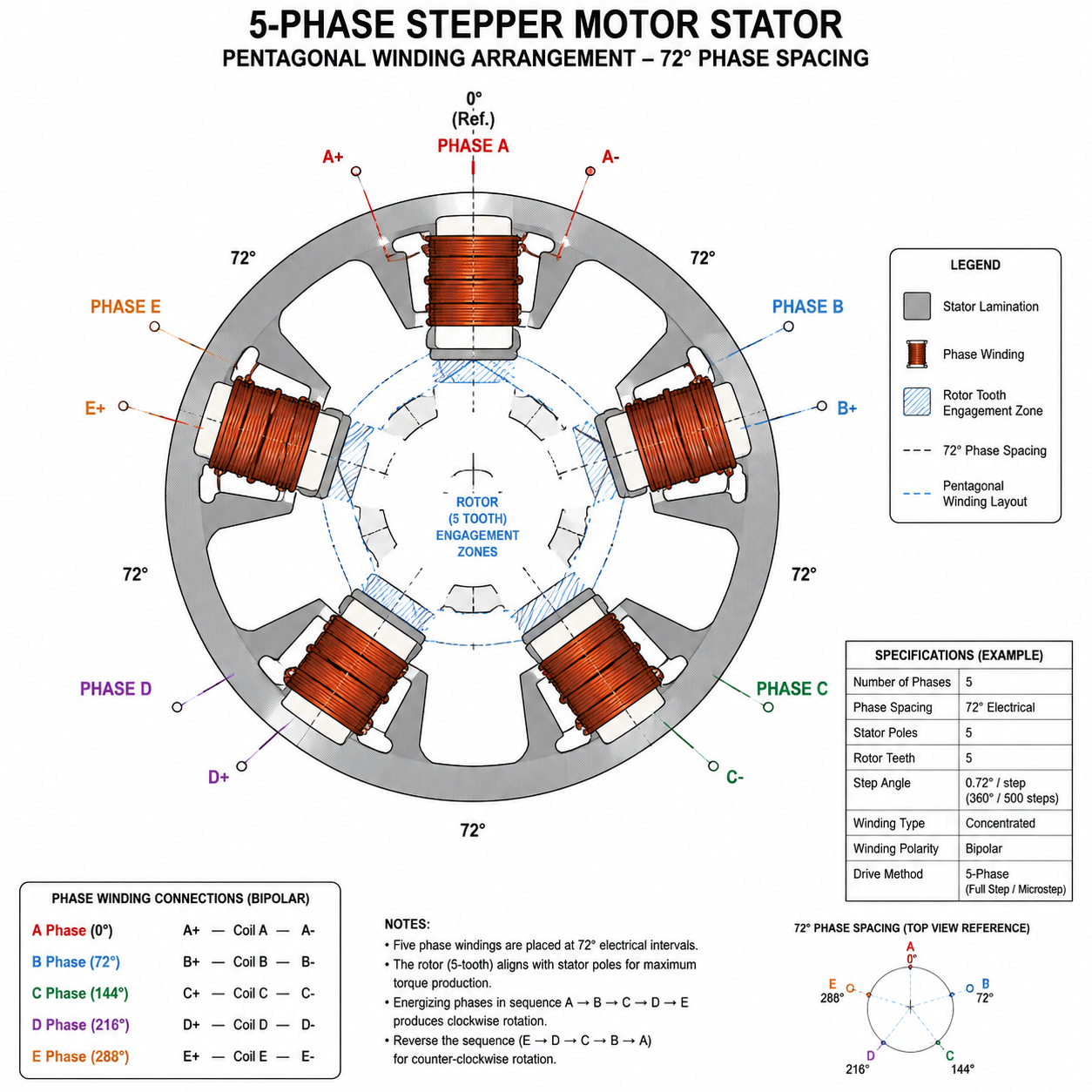
Five-phase steppers are a different category of machine. The stator has five winding sets spaced 72 electrical degrees apart, and the standard step angle drops to 0.72° — 500 steps per revolution in full-step mode. That's 2.5× the native resolution of a 2-phase motor before any microstepping.
The electromagnetic behavior is fundamentally smoother. With five phases active in a pentagonal excitation pattern, the flux vector transitions are small and nearly continuous. Torque ripple in a well-driven 5-phase system is typically below 3% — an order of magnitude better than full-step 2-phase operation. More importantly, the resonance characteristics are dramatically different. The resonance frequency shifts higher and the amplitude is much lower, which is why 5-phase motors are standard in semiconductor wafer handling, optical alignment stages, and precision dispensing equipment where vibration at any frequency is unacceptable.
Positioning accuracy benefits directly from the finer step angle. Even without microstepping, 0.72° steps produce smoother motion profiles and reduce the positional error contribution from step-to-step variation. In a ball-screw linear axis with 5 mm pitch, each full step moves 10 µm — practical for many precision applications without encoder feedback.
The cost and complexity picture is significant. Five-phase drives are more expensive, less universally available, and the winding configuration requires careful attention to phase sequencing. Troubleshooting a 5-phase system in the field is harder than a 2-phase system. For high-volume OEM equipment where the motion performance justifies the investment, it's worth it. For a general-purpose machine tool axis, it usually isn't.
See the types of stepper motors guide for more on how hybrid rotor construction interacts with phase count in precision applications.
Structural Comparison
| Parameter | 2-Phase | 3-Phase | 5-Phase |
|---|---|---|---|
| Winding Sets | 2 | 3 | 5 |
| Electrical Phase Offset | 90° | 120° | 72° |
| Standard Full-Step Angle | 1.8° | 1.2° | 0.72° |
| Steps per Revolution (full step) | 200 | 300 | 500 |
| Driver Switch Count | 4 | 6 | 10 |
| Relative Driver Cost | Low | Medium | High |
| Winding Thermal Distribution | Moderate | Good | Excellent |
Torque Ripple and Motion Smoothness
Torque ripple is the periodic variation in output torque as the rotor moves through one electrical cycle. It's the primary source of velocity ripple in open-loop stepper systems and a significant contributor to acoustic noise and mechanical wear in precision equipment.
| Configuration | Full-Step Torque Ripple | Microstepping Torque Ripple (typical) | Velocity Smoothness |
|---|---|---|---|
| 2-Phase | 25–35% | 5–15% | Moderate |
| 3-Phase | 10–18% | 3–8% | Good |
| 5-Phase | 4–8% | 1–3% | Excellent |
One thing worth noting: microstepping reduces torque ripple but doesn't eliminate it. The winding inductance causes the actual current waveform to deviate from the ideal sinusoid, especially at higher speeds where the drive voltage headroom shrinks. A 5-phase motor with a mediocre drive will outperform a 2-phase motor with a good drive in terms of smoothness — the phase count advantage is structural, not just a driver artifact.
Resonance and Vibration Analysis
Mid-band resonance is the most practically disruptive characteristic of open-loop stepper operation. It occurs when the step excitation frequency matches the rotor's natural oscillation frequency around a stable equilibrium point. At resonance, the rotor doesn't just vibrate — it can lose synchronization entirely.
The resonance frequency depends on rotor inertia, load inertia, and the motor's holding torque stiffness. For a typical NEMA 23 2-phase motor with moderate load, this falls in the 80–200 RPM range. For 5-phase motors, the higher step count and smoother flux transitions push the primary resonance frequency higher and reduce its amplitude significantly.
| Configuration | Primary Resonance Range | Resonance Amplitude | Suppression Difficulty |
|---|---|---|---|
| 2-Phase | 80–250 RPM | High | Requires active compensation |
| 3-Phase | 120–300 RPM | Medium | Moderate — often manageable |
| 5-Phase | 200–500 RPM | Low | Minimal — often self-suppressing |
Current waveform quality plays a significant role here. A drive that produces a clean sinusoidal current profile reduces the harmonic content in the torque output, which directly reduces the excitation energy available to sustain resonance. This is why current-loop bandwidth matters — a drive with a 5 kHz current loop bandwidth tracks the sinusoidal reference much more accurately than one with a 500 Hz bandwidth, and the vibration difference is audible and measurable.
For a detailed treatment of step angle and its relationship to resonance behavior, the step angle explained article covers the geometry in depth.
Step Angle and Positioning Accuracy
| Configuration | Full-Step Angle | Half-Step Angle | Typical Step Accuracy | Repeatability (open loop) |
|---|---|---|---|---|
| 2-Phase | 1.8° | 0.9° | ±5% of step angle | ±0.09° |
| 3-Phase | 1.2° | 0.6° | ±5% of step angle | ±0.06° |
| 5-Phase | 0.72° | 0.36° | ±3% of step angle | ±0.02° |
The ±5% step accuracy figure is non-cumulative — it doesn't stack over multiple steps. But in a system where you're relying on open-loop positioning, the per-step error directly limits your achievable accuracy. A 5-phase motor's smaller step angle means the absolute angular error per step is smaller even at the same percentage tolerance.
Driver Complexity and Control Systems
Two-phase drives are simple enough that competent engineers build them from discrete components. The control logic is a four-state state machine. Microstepping adds a DAC and current loop, but the architecture is well-documented and silicon is cheap.
Three-phase stepper drives borrow heavily from BLDC motor drive architecture. The six-switch bridge topology is identical; the difference is in the commutation table and current reference generation. Some 3-phase stepper drives are actually modified BLDC drives with stepper-specific firmware. This cross-compatibility is useful for OEM designers who want to standardize drive hardware across motor types.
Five-phase drives are specialized hardware. The ten-switch bridge requires careful dead-time management, and the pentagonal current waveform generation is more computationally demanding. The drive cost premium over 2-phase is typically 2–4×. For high-volume production equipment, this gets designed into the BOM from the start. For low-volume or prototype systems, it's a significant barrier.
Industrial Application Comparison
| Application | Recommended Phase Config | Primary Reason |
|---|---|---|
| CNC Router / Plasma Cutting | 2-Phase | Cost, availability, adequate performance |
| CNC Milling (precision) | 3-Phase or 5-Phase | Reduced vibration, better surface finish |
| Industrial Robotics (joint drive) | 2-Phase or 3-Phase | Torque density, speed range |
| Semiconductor Wafer Handling | 5-Phase | Vibration sensitivity, positioning accuracy |
| Packaging Machinery | 2-Phase | Cost, high replacement availability |
| Medical Dispensing / Lab Automation | 5-Phase | Smooth motion, low vibration, accuracy |
| Optical Alignment Stages | 5-Phase | Sub-arc-minute positioning, minimal resonance |
| Conveyor / Material Handling | 2-Phase or 3-Phase | Continuous duty thermal performance |
Which Phase Configuration Should OEM Designers Choose?
The honest answer is: start with 2-phase unless you have a specific reason not to. The ecosystem is mature, the supply chain is global, and for the majority of industrial motion tasks, a well-tuned 2-phase system with a good microstepping drive is entirely adequate.
Move to 3-phase when you're seeing vibration complaints from operators, when surface finish on machined parts is suffering from motor-induced velocity ripple, or when you're running continuous-duty cycles that push thermal limits on 2-phase windings. The cost premium is modest and the performance improvement is real.
Specify 5-phase when the application genuinely demands it: semiconductor equipment, precision optical systems, medical robotics, any application where vibration at any frequency is a problem and positioning accuracy below 0.1° matters. Don't use 5-phase to solve a problem that better microstepping or mechanical damping would fix more cheaply.
Inertia matching deserves mention here. Regardless of phase count, a motor driving a load with 10× its own rotor inertia will have poor dynamic response and resonance problems that no phase count will fix. Get the inertia ratio below 5:1 before worrying about phase configuration. The complete stepper motor technical guide covers inertia matching and system sizing in detail.
OEM Selection Guide
| Design Requirement | 2-Phase | 3-Phase | 5-Phase |
|---|---|---|---|
| Lowest system cost | ✓ Best | Acceptable | Not recommended |
| Reduced vibration / noise | Limited | ✓ Good | ✓ Best |
| High-speed stability | Moderate | ✓ Good | Good |
| Sub-0.1° open-loop accuracy | Not reliable | Marginal | ✓ Yes |
| Continuous duty thermal | Moderate | ✓ Good | ✓ Good |
| Global parts availability | ✓ Excellent | Good | Limited |
| Semiconductor / precision use | Not suitable | Marginal | ✓ Standard choice |
Future Trends in Multi-Phase Stepper Motors
The boundary between stepper motors and servo motors continues to blur. Closed-loop stepper systems — 2-phase motors with encoder feedback and field-oriented control — now deliver servo-like performance at stepper prices. This reduces some of the motivation to move to 5-phase for precision applications, since a closed-loop 2-phase system can compensate for torque ripple and resonance in firmware.
That said, 5-phase motors retain an inherent advantage in applications where the encoder feedback loop itself introduces latency problems, or where the mechanical system is too lightly damped to tolerate the transient disturbances that closed-loop correction produces. In those cases, the smoother open-loop behavior of a 5-phase motor is genuinely preferable to a closed-loop 2-phase system.
On the drive side, integrated motor-drive modules are pushing phase count complexity into the motor housing. Some manufacturers are shipping 5-phase motors with the drive electronics integrated, reducing the system integration burden for OEM designers. This trend will likely accelerate as power electronics miniaturization continues.
Conclusion
Phase count in stepper motors is a fundamental design parameter, not a marketing differentiator. Two-phase motors dominate industrial automation for good reasons — cost, availability, and adequate performance for most tasks. Three-phase motors occupy a useful middle ground for applications where vibration and thermal performance matter. Five-phase motors are the right tool for precision and semiconductor applications where smooth motion and low resonance are non-negotiable.
The selection logic isn't complicated: match the phase configuration to the actual performance requirements of the application, account for the full system cost including drives and integration, and don't over-specify. A well-applied 2-phase system will outperform a poorly applied 5-phase system every time.
Frequently Asked Questions
What is the practical difference between 2-phase and 5-phase stepper motor smoothness?
In full-step operation, a 5-phase motor produces roughly 4–8% torque ripple versus 25–35% for a 2-phase motor. With sinusoidal microstepping, the gap narrows but remains significant — typically 1–3% versus 5–15%. The difference is audible and measurable in precision applications, and directly affects surface finish quality in machining and positional stability in optical systems.
Does microstepping eliminate the need for a 5-phase motor?
Not entirely. Microstepping reduces torque ripple and improves smoothness, but the improvement is limited by winding inductance and back-EMF distortion at speed. A 5-phase motor's structural advantage — more phases, smaller flux transitions — persists even with microstepping. For applications requiring sub-0.1° accuracy or very low vibration, 5-phase remains the better choice regardless of microstepping resolution.
Why do 2-phase stepper motors resonate more than 5-phase motors?
The 2-phase excitation pattern produces larger, more abrupt magnetic flux transitions per step. Each transition imparts an impulse to the rotor that excites its natural oscillation frequency. With five phases, the flux transitions are smaller and more frequent, reducing the impulse energy per step and shifting the resonance frequency higher where it's less likely to coincide with operating speeds.
Can a 3-phase stepper motor use standard 2-phase drivers?
No. Three-phase stepper motors require a 3-phase bridge driver with appropriate commutation logic. Some 3-phase stepper drives share hardware architecture with BLDC drives, but the firmware and current reference generation are specific to stepper operation. Using a 2-phase driver on a 3-phase motor will result in incorrect commutation and likely motor damage.
What is the typical step angle for a 3-phase stepper motor?
Standard 3-phase hybrid stepper motors have a 1.2° full-step angle, giving 300 steps per revolution. This comes from the combination of the 3-phase stator geometry and a 50-tooth rotor — the same rotor used in most 2-phase hybrid steppers. The finer step angle compared to 2-phase (1.8°) contributes to the smoother motion profile.
When is a 5-phase stepper motor not worth the cost?
When the application doesn't require sub-0.1° open-loop accuracy, when vibration levels are acceptable with a 2-phase or 3-phase motor, or when the drive cost premium significantly impacts BOM targets without a corresponding performance benefit. General-purpose CNC axes, packaging machinery, and most conveyor applications don't justify 5-phase. The cost is warranted in semiconductor equipment, precision dispensing, optical alignment, and medical robotics where the performance requirements are genuinely demanding.
How does phase count affect stepper motor thermal performance?
More phases distribute copper losses across more winding sets, reducing the peak temperature in any single winding. A 5-phase motor running at the same RMS current as a 2-phase motor will have lower peak winding temperatures and more uniform heat distribution across the stator. This matters in continuous-duty applications where thermal limits constrain available torque. Three-phase motors offer a meaningful improvement over 2-phase in this regard; 5-phase offers further improvement but with diminishing returns for most industrial duty cycles.